
مشخصات فنی موتورهای الکتریکی
فهرست مطالب
گشتاور: گشتاور اسمی با استفاده از رابطه ي زیر قابلمحاسبه است:
در این رابطه P توان خروجی برحسب کیلووات است و n سرعت برحسب تعداد دور در دقیقه است. لازم به ذکر است که اگر ولتاژ از مقدار اسمی در محدوده مجاز، فاصله گرفت، مقدار گشتاور در حالت روتور قفلشده، گشتاور pull-up و گشتاور شکست بهاندازه توان دوم ولتاژ بهطور تقریبی تغییر خواهند کرد.
سرعت سنکرون:
سرعت سنکرون یا تعداد دور در دقیقه برحسب فرکانس و تعداد قطبهای موتور از رابطه ي زیر به دست میآید:
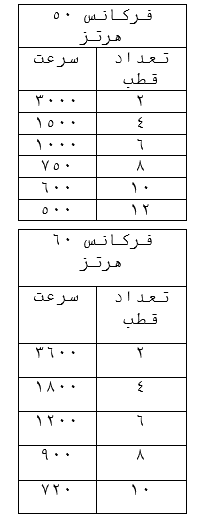
در این رابطه F فرکانس و P تعداد قطب (پل) موتور است. در جدولهای زیر مقدار سرعت سنکرون برحسب تعداد قطب برای فرکانسهای 50 و 60 هرتز ارائهشدهاند:
ولتاژ: افزایش یا کاهش ولتاژ از یک حد مجاز میتواند عملکرد موتور را تحت تأثیر قرار دهد. افزایش 10% ولتاژ از مقدار اسمی، باعث افزایش 20% گشتاور استارت شده و این میتواند سبب آسیبدیدگی موتور به دلایل افزایش جریان در بار اسمی و حرارت شود.
فرکانس: تغییرات در فرکانس میتواند بر روی مشخصات موتور همچون گشتاور و سرعت تأثیرگذار باشد.
ارتفاع: عامل مؤثر دیگر ارتفاع است. الکتروموتورها معمولاً برای ارتفاع تا 1000 متر از سطح تراز دریا در نظر گرفته میشوند. در ارتفاع بالاتر از این مقدار هوا رقیقتر بوده و حرارت بهراحتی انتقال نمییابد.

انواع الکتروموتورها
الکتروموتور ترمز دار:
الکتروموتورهای ترمزدار قابلیت این را دارند که استارت و ترمز آن را میتوان در زمان دلخواه تعیین کرد. از این موتورها در آسانسورها، پلهبرقیها و … استفاده میشود. در صنایع معدنی و صنایع بزرگ نیز از موتورهای سه فاز ترمز دار استفاده میشود که با ترمز مغناطیسی کار میکنند.
انواع ترمز الکتروموتور :
ترمز مکانیکی :
این دسته از موتورها بهصورت الکترومکانیکی عمل میکند، در طراحی این ترمز از دو دیسک که یکی ثابت و دیگری متصل به شفت اصلی الکتروموتور است استفاده میشود.
ترمز بهوسیله اینورتر یا درایو موتور
این دسته از ترمزها برای اعمال ترمز لحظهای به کار گرفته میشوند. مکانیسم کاری این ترمزها ریزپردازندههایی است که قابلبرنامهریزی بوده و توسط کاربر پارامترها، تنظیم و اعمال میگردد.
ترمز جریان مستقیم DC
استفاده از این ترمز صرفاً به خاطر توقف آنی روتور در لحظه ایست است و مدار اتصال ترمز تا چند ثانیه بعد از استپ الکتروموتور در مدار باقی میماند.
به کار بردن این نوع ترمز در گیربکسهای شافت مستقیم برای مصارفی که دستگاه در زیر بار بخواهد توقف نماید توصیه نمیشود. چون بعد از قطع مدار ترمز، الکتروموتور بر اثر فشار بار شروع به دوران مینماید.
ترمز جریان معکوس
تغییر جهت گردش در موتورهای سه فاز با تعویض جای دو فاز و در موتورهای تک فاز با تعویض یکی از دو سر سیمپیچ اصلی یا راهانداز امکانپذیر میشود.

الکتروموتور ضد انفجار:
در بسیاری از بخشهای صنعتی مانند صنایع شیمیایی، پالایشگاهها، سکوهای حفاری و … خطر انفجار وجود دارد. خطر انفجار زمانی بیشتر میشود که گاز، نفت یا سیار سوختها در یک نسبت مشخصی با اکسیژن ترکیب شوند و احتراق ایجاد کنند.
الکتروموتور ضد انفجار یا ضد جرقه (Explosion Proof) بهگونهای طراحیشده است که انفجار احتمالی داخل آن به بیرون منتقل نشود و باید به حدی آببندیشده باشد که در محیطهای حاوی گازهای قابلانفجار، از ورود گاز به داخل الکتروموتور و خطر انفجار آن جلوگیری کند.
بهطورکلی الکتروموتورها به دودسته پوسته باز و پوسته محصور تقسیم میشوند.
الکتروموتور ضد انفجار پوسته باز در چهار درجه حفاظت (IP) زیر تولید میشود:
۱. حفاظتشده در برابر قطره
۲. حفاظتشده در برابر پاشش
۳. حفاظتشده در برابر شرایط آب و هوایی
۴. کاملاً محافظتشده
الکتروموتورهای پوسته باز برای محیطهای خطرناک و با ریسک بالا مناسب نیستند.
الکتروموتورهای پوسته محصور در انواع زیر تولید میشوند:
۱. الکتروموتورهای محصور بدون تهویه هوا
۲. الکتروموتورهای محصور با پروانه خنککننده
۳. الکتروموتورهای محصور با هوای کافی
۴. الکتروموتورهای محصور ضد انفجار
الکتروموتورهای ضد انفجار برای محیطهای پرخطر بهصورت زیر دسته بندی میشوند:
کلاس I: گازها، بخاراها و مایعات، شامل گروههای زیر:
گروه A: استیلن
گروه B: هیدروژن و مشتقات آن
گروه C: اتر و مشابه آن
گروه D: سوختها و حلالها و مانند آن
دستهبندی ۱: مخاطرات انفجاری معمول
دستهبندی ۲: مخاطرات انفجاری غیرمعمول
کلاس II: گردوغبار، شامل گروههای زیر:
گروه E: غبار فلزات هادی و منفجر کننده
گروه F: غبار کربن که غالباً هادی و قابلانفجارند
گروه G: آرد، نشاسته و پلاستیکهای قابلاحتراق
دستهبندی ۱: مقادیر قابل اشتعال غبار یا غبارهای هادی که بهطورمعمول در محیط موجود هستند.
دستهبندی ۲: غباری که بهطورمعمول و به مقداری که قابل اشتعال باشند در هوا معلق نیست.
در انتخاب الکتروموتورهای ضد انفجار باید استانداردهای الکتروموتور ضد انفجار وکلاس و گروه موردنیاز را موردتوجه قرار داد.
با توجه به محیط بر اساس استاندارد ATEX یک گواهی برای موتورهای ضد انفجار داده میشود که کد مخصوص دارد. این کد مخصوص دارای آیتمهای زیر است:
- علامت مخصوص ضد انفجار ؛
- دسته بندی محیطی: I: زیرزمین، II: سایر نواحی,
- اتمسفر انفجاری: G: گاز، D: گردوغبار
- نوع محافظت در برابر انفجار: nA، d، de، e، tb، tc
- کلاس دمایی: حداکثر دمای سطحی: T1: 450 درجه، T2: 300 درجه، T3: 200 درجه، T4: 135 درجه، T5: 100 درجه، T6: 85 درجه.
شرکتها و برندهای مختلف و مطرح در تولید الکتروموتور، انواع الکتروموتورهای ضد انفجار EEX را تولید میکنند:
– الکتروموتور ضد انفجار WEG ساخت کشور برزیل
– الکتروموتور ضد انفجار Siemens
– الکتروموتور ضد انفجار VEM
– الکتروموتور ضد انفجار ABB
– الکتروموتور ضد انفجار AEG
لازم به ذکر است هرگونه دستکاری، باز و بسته کردن، نصب فلنچ و … بر روی الکتروموتورهای ضد انفجار یا ضد انفجار اشتباه بوده و آنها را از حالت ضد انفجار خارج میکند.

راهنمای انتخاب الکتروموتور :
مرحله 1- نیازمندیهای فنی برای موتور
در این مرحله مشخصات فنی یعنی:
- فرکانس و ولتاژ اسمی؛
- حالت عملیاتی (استاندارد یا پیوسته)؛
- میزان محافظت، ضد انفجار بودن/ نبودن
- سرعت ماسمی (دور بر دقیقه)
- توان اسمی؛
- گشتاور اسمی؛
- نوع ساختمان؛
مرحله 2- شرایط نصب و تعریف کاربرد برای موتور:
- دمای محیط؛
- ارتفاع نصب؛
مرحله 3- تعیین محدوده موتورهای قابلاستفاده:
با تعیین سایز و ابعاد موتور میتوان موتورهای قابلاستفاده را بر اساس: روش سردسازی، میزان محافظت، توان، سرعت و گشتاور
مرحله 4- تعیین کد موتور
با توجه به پارامترهای: توان اسمی، سرعت اسمی، گشتاور اسمی و شدتجریان اسمی میتواند کد موتور را تعیین کرد.
مرحله 5- تکمیل کد موتور
با توجه به نیازمندی موارد ویژه تعیین و کد مربوطه تعیین شود (مواردی از قبیل ولتاژ خاص موردنیاز و نوع ساخت موتور (فلنج و …)، حفاظت موتور و میزان محافظت، سیمپیچ و عایق، رنگ و پرداخت رنگ و …)
مرحله 6 – چک کردن ابعاد موتور
ابعاد و مقادیر اندازهگیری شده چک شوند. در صورت نیاز مبدل فرکانسی تهیه شود.
روابط و محاسبات پایه در الکتروموتورها
محاسبه تعداد قطبهای موتور
برای تشخیص تعداد قطب موتور سه فاز، روشهای مختلفی وجود دارد. یکی از سادهترین روشها استفاده از رابطه سرعت سنکرون است:
P = (120 × f) / n
که در آن:
- P: تعداد قطبها
- f: فرکانس برق ورودی (هرتز)
- n: سرعت سنکرون (دور بر دقیقه)
برای مثال، اگر موتوری با فرکانس 50 هرتز و سرعت 1500 دور بر دقیقه داشته باشیم:
P = (120 × 50) / 1500 = 4 قطب
رابطه فرکانس، دور و قطب در موتورهای الکتریکی
فرکانس برق ورودی تأثیر مستقیمی بر سرعت موتور دارد. در موتورهای القایی، سرعت واقعی کمی کم تر از سرعت سنکرون است که به آن لغزش میگویند. جدول زیر ارتباط بین تعداد قطبها و سرعت سنکرون را در فرکانسهای استاندارد نشان میدهد:
| برای فرکانس 50 هرتز | |
| 2 قطب | 3 هزار دور بر دقیقه |
| 4 قطب | هزارو پانصد دور بر دقیقه |
| 6 قطب | هزار دور بر دقیقه |
| 8 قطب | 750 دور بر دقیقه |
روابط توان، گشتاور و سرعت
رابطه بین توان و گشتاور موتور الکتریکی به صورت زیر است:
P = T × ω
که در آن:
- P: توان مکانیکی (وات)
- T: گشتاور (نیوتن متر)
- ω: سرعت زاویهای (رادیان بر ثانیه)

انواع موتورهای الکتریکی و کاربردها
موتورهای سه فاز و مشخصات آنها
موتورهای سه فاز در انواع مختلفی تولید میشوند:
موتورهای القایی قفس سنجابی: این موتورها رایجترین نوع موتورهای الکتریکی هستند. روتور آنها از میلههای مسی یا آلومینیومی تشکیل شده که بهصورت قفس به هم متصل شدهاند. این ساختار ساده باعث استحکام بالا، هزینه نگهداری پایین و قابلیت اطمینان بالا میشود.
موتورهای رتور سیمپیچی شده: در این موتورها، روتور دارای سیمپیچیهای مشابه استاتور است که به حلقههای لغزان متصل میشوند. این طراحی امکان کنترل مقاومت روتور و در نتیجه تنظیم گشتاور راهاندازی و سرعت را فراهم میکند. این موتورها برای کاربردهایی با نیاز به گشتاور راهاندازی بالا مناسب هستند.
موتورهای سنکرون: موتورهای سنکرون دقیقا با سرعت میدان دوار استاتور میچرخند (بدون لغزش). روتور آنها از آهنرباهای دائم یا سیمپیچی تحریک DC تشکیل شده است. این موتورها راندمان بالایی دارند و برای کاربردهایی که نیاز به سرعت ثابت و دقیق دارند، مانند ژنراتورها و کمپرسورها استفاده میشوند.
مشخصات کلیدی موتورهای سه فاز شامل:
- راندمان بالا
- قابلیت تحمل اضافه بار
- عمر طولانی
- هزینه نگهداری پایین
دینامها و ژنراتورهای الکتریکی
دینامها و ژنراتورها نوعی مبدل انرژی مکانیکی به الکتریکی هستند. مشخصات اصلی دینامها عبارتند از:
- ولتاژ خروجی
- جریان نامی
- سرعت کاری
- نوع تحریک (سری، شنت یا مرکب)
کنترل و تنظیم موتورهای الکتریکی
روشهای تغییر دور در موتورهای سه فاز
برای تغییر دور موتورهای سه فاز روشهای متداول عبارتند از:
- تغییر فرکانس با استفاده از اینورتر
- تغییر تعداد قطبها (موتورهای دالاندر)
- تغییر ولتاژ تغذیه
- کنترل مقاومت روتور در موتورهای روتور سیمپیچی
درباره نحوه کارکرد الکترو موتورها بیشتر بدانید
سیستمهای ترمز الکتریکی و مغناطیسی
ترمز الکتریکی موتور سه فاز به روشهای مختلف انجام میشود:
- ترمز جریان مستقیم
- ترمز جریان معکوس
- ترمز مغناطیسی
در ترمز مغناطیسی، از یک سیستم الکترومغناطیسی برای ایجاد نیروی ترمزی استفاده میشود که مزایای آن عبارتند از:
- عملکرد سریع و دقیق
- استهلاک کم
- قابلیت کنترل نیروی ترمز
- عدم نیاز به تعویض لنت
تنظیم سرعت و کنترل گشتاور
برای افزایش دور موتور الکتریکی میتوان از روشهای زیر استفاده کرد:
- استفاده از درایو فرکانس متغیر (VFD)
- تنظیم ولتاژ ورودی
- استفاده از سیستمهای کنترل دیجیتال
رابطه گشتاور و سرعت در موتورهای الکتریکی به صورت غیرخطی است و با افزایش سرعت، گشتاور کاهش مییابد. این رابطه در طراحی سیستمهای کنترلی باید مورد توجه قرار گیرد.
دسته بندی: مقالات