
معرفي ، مشخصات فني و راهنماي نحوه انتخاب ويبراتورهاي صنعتي
فهرست مطالب
موتور ویبراتور وسیلهای است که برای ایجاد ارتعاشات استفاده میشود. ارتعاشات معمولاً از طریق یک موتور الکتریکی با بار نامتعادل بر روی یک میله متحرک ایجاد میشوند.
مقدمه و معرفی موتور ويبره
ويبراتورها بسته به نوع کاربرد میتوانند انواع مختلفی داشته باشند. قیفهای ارتعاشی، غربالهای ارتعاشی و ریختهگری بتن از انواع مختلف ويبراتورها هستند که در صنایع مختلفی ازجمله صنایع غذایی، دارویی و شیمیایی کاربرد دارند.

ويبراتورهایی که با نیروی جاذبه کار میکنند میتوانند در به حرکت درآوردن ذرات مؤثرتر از روشهای دیگر باشند. در این موارد ارتعاش برای چسبیدن ذرات به یکدیگر استفاده میشود.
غربالهای ارتعاشی برای جداسازی مواد در مخلوطی از ذرات با اندازه متفاوت کاربرد دارد. مثلاً ماسه، گراول و سنگهای بستر رودخانه که ابعاد مختلفی دارند، با استفاده از غربالهای ارتعاشی ذرات هماندازه جدا میشوند.
فشردهسازهای ارتعاشی نیز برای چسبندگی خاک بهویژه در زیرساختهایی نظیر جادهها و ریلها کاربرد دارد.
در صنعت بتن موتورهای ارتعاشی برای فشردهسازی بتنها استفاده میشوند تا هوای به دام افتاده و آب اضافی از بتن خارج شود.
میز ارتعاشی نوع دیگری از ويبراتورهاست که برای آزمایش محصولات و سنجش مقاومتشان در برابر ارتعاش استفاده میشود. این مورد در صنایع خودرو هوافضا و صنایع دفاع کاربرد دارد.
شیوهی کار در موتورهای ویبره به این صورت است که در دو سمت شفت دوار، لنگهایی وجود دارند که با ایجاد نیروی گریز از مرکز منجر به ایجاد ارتعاش یا لرزش میشوند.
انواع موتور ویبره به لحاظ ظاهری
- موتورهاي ویبره با بدنه کوچک
این نوع از موتورهای ویبره که به آن میکرو ویبره نیز گفته میشود برای واردکردن ضربات کوچک بهاندازه 20 تا 30 کیلوگرم استفاده میشوند.
- موتورهاي ویبرهی ضد انفجار
در این نوع ویبرهها جعبه برق و اتصالات الکتریکی آنها کاملاً ایمن است و احتمال ایجاد اتصال و جرقه ناشی از آن بهشدت کاهش مییابد.
- موتورهاي ويبره با فرکانس بالا
این ویبرهها در فرکانس زیاد و بهمنظور تنشزدایی کاربرد دارد. در طراحی این ويبراتورها از یاتاقانهایی استفاده میشود که تحمل فرکانس زیاد را داشته باشند.
سیستمهای الکترو ویبره را که از ارتعاش استفاده میکنند میتوان به دو دسته تقسیمبندی کرد:
- سیستم نوسان آزاد چرخشی
- سیستم نوسان آزاد یک طرفه
در سیستمهای نوسان آزاد چرخشی، نیروی ایجاد شده در تمام جهات 360 درجه در جهت ساعتگرد یا پادساعتگرد اعمال میشود که به این حالت، حالت چرخشی گفته میشود. در حالت دیگر نیرو در یکجهت و به شکل رفت و برگشتی متناوب اعمال میشود که به این نوع سیستمها سیستم نوسان یک طرفه گفته میشود.
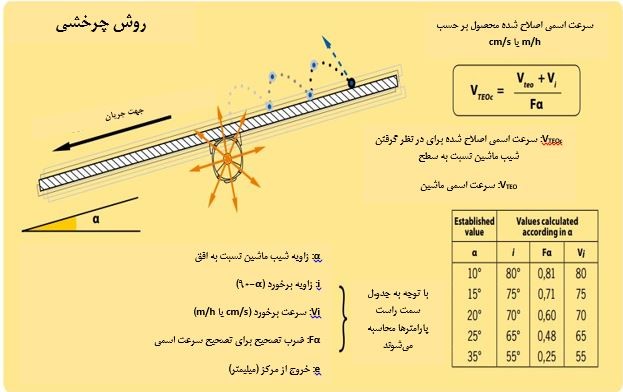
روش چرخشی ربا استفاده از یک موتور الکترو ویبره قابلدستیابی است. ولی روش یکطرفه نیاز به دو موتور الکترو ویبره و با مشخصات الکترومکانیکی مشابه دارد که این دو موتور در خلاف جهت یکدیگر باید کار کنند.
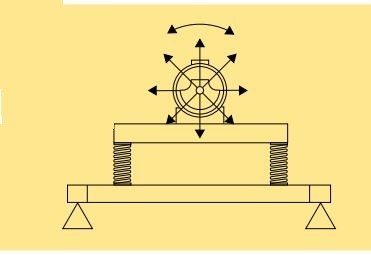
سیستمهای نوسان آزاد چرخشی- نیروی ارتعاشی در تمام جهات منتشر میشود.
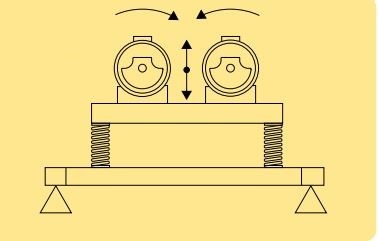
سیستمهای نوسان آزاد یکطرفه- نیروی ارتعاشی در تمام یک جهت اعمال میشود.
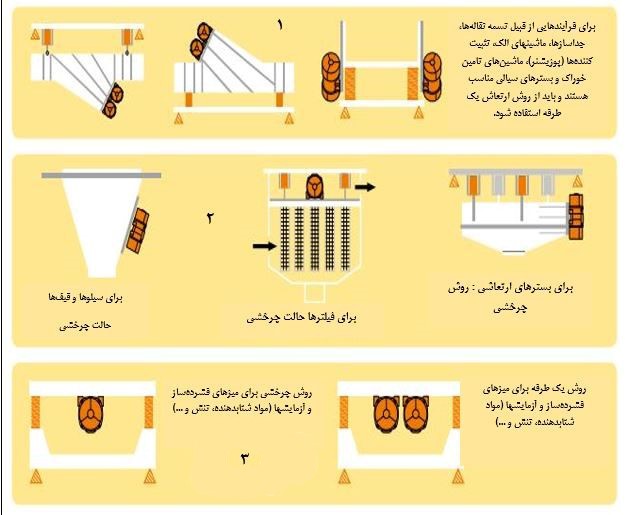
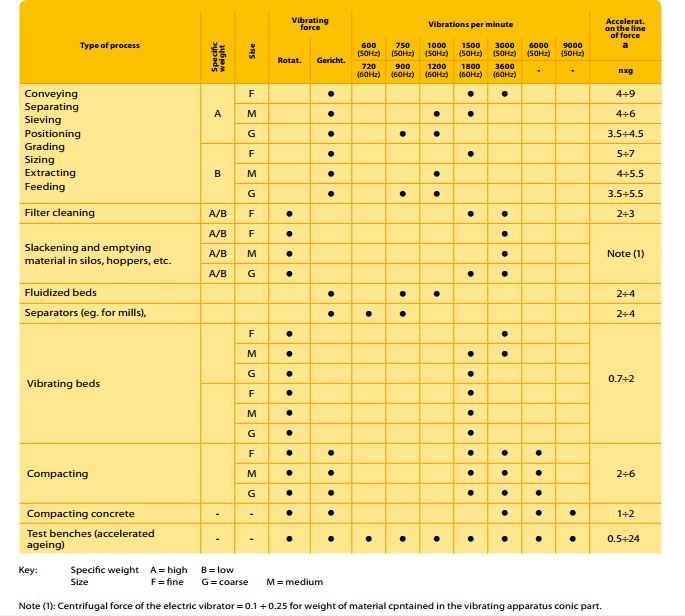
مثالهایی از کاربردهای موتور الکترو ویبره در فرآیندهای مختلف
در شکل فوق مثالهایی از کاربرد موتورهای الکترو ویبره در فرآیندهای مختلف نشان دادهشده است. در حالت 1 موتورهای نشان دادهشده برای فرآیندهایی از قبیل تسمه نقالهها، جداسازها، ماشینهای الک، تثبیتکنندهها (پوزیشنر)، ماشینهای تأمین خوراک و بسترهای سیالی مناسب هستند و باید از روش ارتعاش یکطرفه استفاده شود.
در حالت 2 برای سیلوها و قیفها، فیلترها و بسترهای ارتعاشی از روش چرخشی بهتر است استفاده شود. در حالت 3 نیز برای میزهای فشردهساز و آزمایشها هر دو روش چرخشی و یک طرفه برای ارتعاش میتوانند استفاده شوند.
مشخصات فنی موتورهای الکترو ویبره
1. تأمین برق
تأمین برق موتورهای الکترو ویبره میتواند به شکل تکفاز یا سه فاز باشد. محدودهي ولتاژ و فرکانسهای آن نیز به نوع موتور و موقعیت مورداستفاده بستگی دارد.
2. قطبیت مغناطیسی (2، 4، 6 یا 8 قطبی)
در هر موتور الکتریکی قطب مغناطیسی وجود دارد. این قطبهای مغناطیسی با رشتههایی که دور یک هسته پیچیده شدهاند ایجاد میشوند. تعداد و نحوه قرارگیری این رشته سیمها تعداد قطبها در موتور را مشخص میکند.
تعداد قطبهای مغناطیسی سرعت موتور (برحسب Rpm) را مشخص میکند. هر چه تعداد قطبها بیشتر باشد سرعت موتور کمتر خواهد بود. با داشتن فرکانس موتور و تعداد قطبها میتوان سرعت موتور را با رابطه ي زیر محاسبه کرد:
v(rpm)=60*f(Hz)/N
در این رابطه f فرکانس، N تعداد قطبهای مغناطیسی و v سرعت موتور است.
لازم به ذکر است که دورهای کمتر سبب ایجاد ضربههای سنگینتر و دورهای بالاتر دارای ضربههای بیشتر ولی باقدرت کمتر است .
3. نیروی گریز از مرکز
نیروی گریز از مرکز یک شبه نیرویی است که بر یک جسم در حال حرکت در یک مسیر دایرهای وارد میشود و اندازهي آن برابر نیروی مرکزگرا است.
یکی از مشخصههای موتورهای ارتعاشی میزان نیروی گریز از مرکز است که میتوانند ایجاد کنند. این نیرو برحسب کیلوگرم یا نیوتون بیان میشود و میزان گریز از مرکز از 0 تا 100 درصد قابل تنظیم است.
4. دمای محیط
موتورهای الکترو ویبره قابلیت کار در دماهای 20- تا 40+ درجه سانتیگراد را دارند.
5. حفاظت
در این موتورها حفاظت به روشهای مکانیکی، آب و هوایی و نیز حرارتی انجام میشود.
- حفاظت مکانیکی: شامل حفاظت در برابر گردوغبار و رطوبت است و بر اساس استانداردهای IEC 529, EN 60529 و IEC 68, EN 50102 انجام میشود.
- حفاظت تروپیکی: حفاظت تروپیکی به معنای حفاظت دستگاه در برابر تغییرات و شرایط جوی از قبیل گرما، سرما، رطوبت، حملات قارچی و … است.
6. عایق حرارتی
عایق حرارتی برای موتورهای الکترو ویبره در کلاسهای F (150 درجه) و H (180 درجه سانتیگراد) انجام میشود.
راهنمای انتخاب موتورهای الکترو ویبره
برای اینکه مشخص شود کدام نوع موتور الکترو ویبره مناسب است باید محیطی که موتور قرار است کار کند، حداکثر دما و در صورت لزوم نوع حفاظت مورد نیاز مشخص شود.
انتخاب روش ارتعاش، سرعت چرخش و فرکانس
انتخاب روش ارتعاش و فرکانس لازم برای دستیابی به بیشترین میزان بازدهی به وزن مخصوص و ابعاد مواد مورد استفاده دارد.
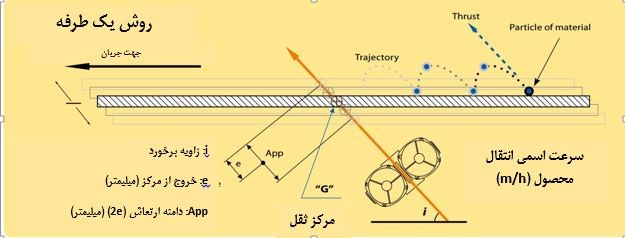
صرفنظر از روش ارتعاشی انتخابی، موتورهای الکترو ویبره را میتوان بر روی یک ماشین سوار کرد به شکلی که محور آن در راستای افقی یا قائم قرار بگیرد و یا اینکه در یک زاویهای بین این دو قرار بگیرد.
زاویه برخورد (که با i نمایش داده میشود)، زاویه بین خط نیرو نسبت به صفحه افقی باید برای موتورهایی که از نوع یکطرفه هستند در نظر گرفته شوند.
⇐ بسیار مهم: خط نیرو برای هر زاویه برخوردی باید از مرکز ثقل ماشین عبور کند.
محدوده زاویه برخورد
تعیین زاویه برخورد خط نیرو به نوع فرآیند بستگی دارد و باید در محدوده ارائهشده قرار بگیرد.
| زاویه برخورد | کاربرد |
| بین 6 تا 12 درجه | برای جداسازهای مخصوص |
| بین 25 تا 30 درجه | برای حملونقل، باربرداری، خوراک دادن، جایگذاری و غربالگری |
| بین 31 تا 45 درجه | الک کردن، رتبهبندی و جداسازی |
| بین 45 تا 80 درجه | بسترهای سیالی |
نحوه انتخاب صحیح موتور الکترو ویبره برای یک فرآیند (مثال انتقال مواد)
با استفاده از شکل 1 روش ارتعاش و تعداد ارتعاش در دقیقه (فرکانس) را بسته به فرآیند و اندازه مواد تعیین کنید. اکنون با توجه به تعداد ارتعاش در دقیقه و زاویه برخورد، دیاگرام متناظر را انتخاب کنید.
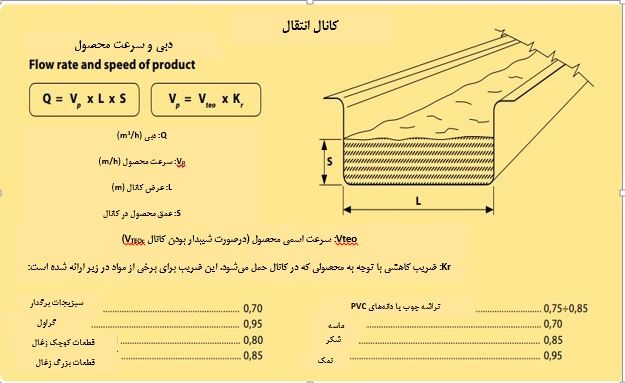
با استفاده از این دیاگرام، مقدار پارامتر «گریز از مرکز» (e) و مقدار دامنه ارتعاش (App) برحسب میلیمتر مقدار سرعت اسمی (تئوری) انتقال محصول برحسب متر بر ساعت یا سانتیمتر بر ثانیه به دست میآید. با در نظر گرفتن ضریب کاهشی (که به جنس محصول مدنظر برای انتقال بستگی دارد) سرعت واقعی انتقال به دست میآید.
با داشتن پارامتر خروج از مرکز (e) میتوان مقدار مومنتوم استاتیک (برحسب Kg.mm) را برای موتور الکترو ویبره محاسبه کرد. رابطهي محاسبه مومنتوم به شکل زیر است: Mt=e×Pv
که در این رابطه Pv وزن مجموعهي ارتعاش است و از رابطهي زیر به دست میآید: Pv=Pc+Po
در این رابطه Pc وزن تجهیزات ایزوله شده و Po وزن الکترو ویبره است.
⇐ بسیار مهم: مومنتوم محاسبهشده (Mt) مومنتوم کلی دستگاه است. مثلاً اگر دستگاه دو الکترو ویبره دارد باید برای محاسبه مومنتوم استاتیک هر یک، مونتوم کلی را بر دو تقسیم کرد.
بر اساس مومنتوم استاتیک محاسبهشده میتوان نوع الکترو ویبره را تعیین کرد.
تعیین میزان فرکانس موردنیاز و شتاب با توجه به نوع فرآیندی که در آن از موتورهای الکترو ویبره استفاده میشود.
تأیید درستی انتخاب الکترو ویبره
برای اینکه معلوم شود موتور الکترو ویبره انتخابشده نیاز ما را برطرف خواهد کرد، ابتدا نیروی گریز از مرکز موتور را با توجه به کاتالوگ به دست میآوریم و پسازآن با استفاده از رابطهي زیر پارامتر شتاب را تعیین میکنیم: a=Fc/Pv
با استفاده از این رابطه پارامتر شتاب در راستای خط نیرو محاسبه میشود. این عدد باید در محدودهي مشخصشده در شکل بالا باشد.
← توجه: اگر روش ارتعاش انتخابشده «یکطرفه» باشد، مقدار Fc باید دو برابر مقدار بهدستآمده از کاتالوگ باشد زیرا در این روش دو الکترو ویبره استفاده میشود.
حفاظت مکانیکی تجهیزات ارتعاشی از سیستم یاتاقان و سیستم الاستیک
اگر سیستم ارتعاش آزاد استفاده میشود، توصیه میشود از پایههای ضد ویبره استفاده شود (مانند فنرهای فولادی مارپیچی، محافظ پلاستیکی یا پیستون پنوماتیکی) تا ماشین ویبره بتواند آزادانه در تمام جهات حرکت کند.
برای سیستمهای ارتعاش آزاد از میلههای اتصالی، فنرهای ورقهای یا پهن استفاده نکنید.
بخش غیر ارتعاشی ماشین باید ظرفیت کافی داشته باشد تا وزنی معادل وزن کلی (مجموع وزن الاستیک ماشین و وزن موتورهای الکترو ویبره و یاتاقانها) را تحمل کند. برای ایمنی مجموع وزن در یک ضریب بین 2 تا 5/2 ضرب میشود؛ بنابراین ظرفیت قسمت الاستیک برابر است با:
Q(kg)= (Pv+Ps)/N×2.5
در این رابطه Pv وزن مجموعه ارتعاشی است و Ps وزن قسمت استاتیک ماشین و N تعداد پایههای ضد ارتعاش است.
اکنون باید میزان خمش قسمت الاستیک محاسبه شود.
بسته به میزان فرکانس ارتعاش (دور در دقیقه موتور الکترو ویبره) و با درنظر گرفتن نسبت رزونانس (بین فرکانس ارتعاش قسمت ویبره و فرکانس قسمت الاستیک) بین 3 تا 5 از دیاگرام زیر میتوان میزان خمش را محاسبه کرد.
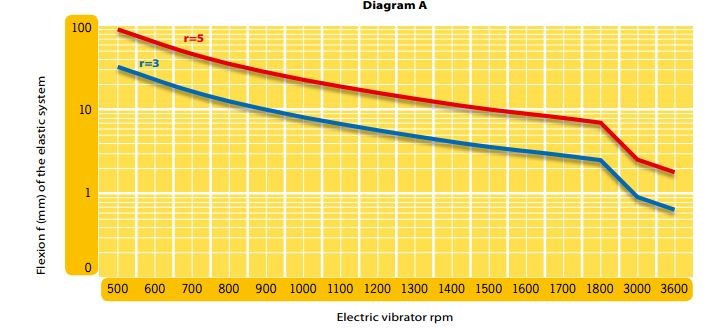
محاسبه نسبت خمش با استفاده از دور در دقیقه موتور و نسبت رزونانس
با محاسبه نسبت خمش میتوان ثابت الاستیک پایههای ضد ویبره را محاسبه کرد:
K_(kg-mm)= Pv/(f×N)
که در این رابطه Pv و N به ترتیب وزن مجموعه ارتعاشی و تعداد پایههای ضد ارتعاش هستند. با داشتن ظرفیت وزنی Q و ثابت الاستیک K میتوان پایههای ضد ویبره را در بازار انتخاب کرد.
ضروری است که وزن قسمت ارتعاشی به شکل یکنواخت روی قسمت الاستیک توزیع شود. شکل زیر درصد محافظت قسمت الاستیک بین قسمتهای ارتعاشی و تکیهگاه بسته به نسبت رزونانسی r نشان میدهد.
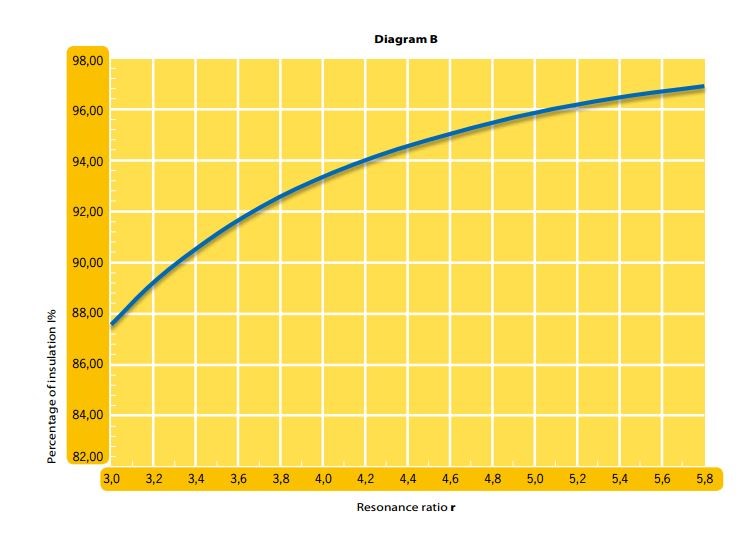
درصد محافظت برحسب نسبت روزنانس
پایههای ضد ارتعاش باید به شکلی قرار گیرند تا میزان خمش برای تمامی اجزا یکسان باشد تا تعادل دستگاه حفظ شود.
⇐ بسیار مهم: قسمت تکیهگاه که بر روی آن پایههای ضد ویبره و قسمت ارتعاشی سوار میشوند باید اتصال محکمی با زمین داشته باشد و یا به یک تکیهگاه محکم دیگری بدون داشتن اجزای ضد ویبره متصل گردد.
معرفی سیستمهای کنترلی برای موتورهای الکترو ویبره
- سیستمهای کنترلی الکترونیکی
این سیستمهای پیشرفته بسته به نصب آنها، قادر به تغذیه 6 الی 72 موتور الکترو ویبره هستند. با توسعه این سیستم تا 864 موتور را نیز میتوان شارژ کرد.
با داشتن یک پنل مخصوص سیستمهای کنترل الکترونیکی، یک ترمینال (پایانه) تعاملی برای تفسیر مرتبسازی و نمایش فرمولهای ارتعاش دارند. این سیستمها قابلیت کنترل از راه دور نیز دارند.
یکی از ویژگیهای خاص این سیستم VIBRAVAR یا مبدل الکترونیکی فرکانس ارتعاش و نیز VINRALOGIC یا مدار PLC (ابزار دقیق) برای مدیریت محاسباتی وضعیت ارتعاش است. این سیستم را میتوان باقابلیت کنترل از راه دور VIBRATEL، سیستم انعکاس لیزر VIBRALASER و نرمافزار مدیریتی VIBRAGEST مجهز کرد.
- سیستمهای CFV با کنترل الکترومکانیکی
این سیستم شامل یک پنل تغذیه میشود که دارای VIBRAVAR الکترونیکی برای تبدیل فرکانس و چندین پنل کوچک برای کنترل ویبراتورها و فرکانس ارتعاش آنها است.
پنل تغذیه این سیستم قادر است 10 زیر پنل (پنل کوچک) را بسته به نوع آنها، تغذیه کند. هرکدام از این پنلهای کوچک با یک سوکت یا خروجی از نوع hitch به ویبراتورها متصل میشوند و 4 الی 10 ویبراتورها را میتوانند کنترل کنند.
هرکدام از این پنلها همچنین 7 فرکانس ثابت ارتعاشی و 1 فرکانس متغیر دارند.
برد CFV میتواند به شکل مستقیم 11 ویبراتور را تغذیه کند (در این مورد CFV بهتر است همراه با محافظها و به شکل تمرینی برای موتورها تست شود). همچنین این برد میتواند تا 10 برد دیگر را تغذیه کند.
- سیستمهای کنترل الکترومکانیکی MULTIVAR
سیستم MULTIVAR ابزاری مناسب برای تعویض سیستمهای مبدل الکترومکانیکی مرسوم هستند که با یک فرکانس ثابت کار میکنند چراکه قادر هستند با فرکانس و نیروی گریز از مرکز متغیر کار کنند.
این سیستم برای تولیدکنندگان اجزای کوچک بتنی و یا تولیدکنندگان بتن پیشساخته برای تولید اجزایی که به فرمهای عادی قابلتولید نیست، گزینهای مناسب است.
MULTIVAR با تجهیزات کنترلی و حفاظتی کاملی همراه است و لذا میتواند به شکل مستقیم به موتورهای الکترو ویبره متصل شود.
برند Italvibras موتورهاي الکترو ويبره
شرکت Italvibras یک شرکت ایتالیایی است با قدمت طولاني و دارای تجربه بسيار زیادی در زمینهي موتورهای الکترو ویبره است. رشد و توسعه ي پیوسته این شرکت باعث شهرت جهانی آن شده است و اکنون این شرکت در کشورهای فرانسه، آلمان، اسپانیا و آمریکا نمایندگی دارد.

توانایی طراحی و تولید طیف متنوعی از محصولات توسط خود شرکت، تمرکز بر کیفیت و تجربه زیادی که در طول زمان بهدستآمده است، این شرکت را تبدیل به یک الگو در جهان صنعت کرده و خود را برندي متمايز شناسانده است.
شرکت تکنوتاو نيز در راستاي تامين برترين و باکيفيت ترين تجهيزات صنعتي، در بخش موتورهاي ويبره، برند ايتال ويبره، OLI ،omb برند های ساخت ترکیه و ایران را از بين برندهاي مطرح، برگزيده است.
دسته بندی: مقالات